
Linux中断
函数
- 中断号
每一个中断都有一个对应的中断号, request_irq函数用来申请所需要的中断, 有可能会导致睡眠, 所以要在可以睡眠的位置调用
int request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags,const char *name, void *dev)
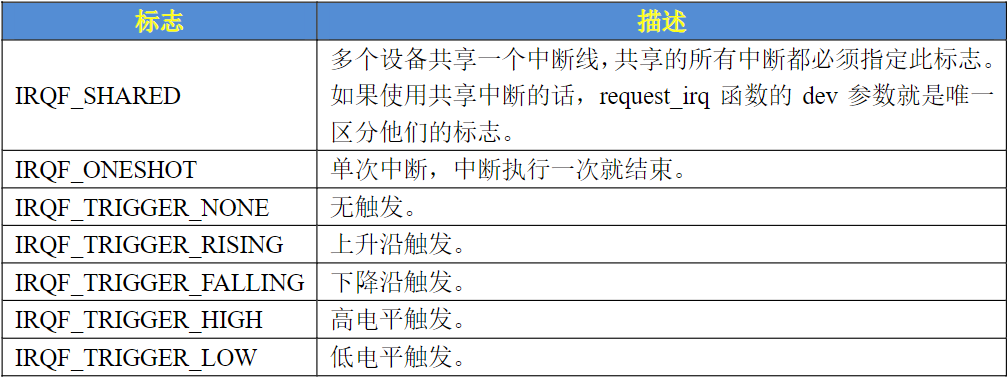
irq:要申请中断的中断号。handler:中断处理函数,当中断发生以后就会执行此中断处理函数。flags:中断标志在文件include/linux/interrupt.h里面查看所有 name:中断名字,设置以后可以在/proc/interrupts文件中看到对应的中断名字。dev:如果将flags设置为IRQF_SHARED的话,dev用来区分不同的中断,一般情况下将dev设置为设备结构体,dev会传递给中断处理函数irq_handler_t的第二个参数。
- 申请一个线程中断
int devm_request_threaded_irq(struct device *dev, unsigned int irq, irq_handler_t handler, irq_handler_t thread_fn, unsigned long irqflags, const char *devname, void *dev_id)
是申请线程中断, 参数一, 申请的设备, 参数二, 中断号, 参数三
handler:中断处理函数,发生中断时,先处理中断处理函数, 参数4中断处理线程,该参数可为NULL。类似于中断处理函数的下半部分, 参数5: 中断标志, 参数6中断名称, 参数7: 传递的参数
void free_irq(unsigned int irq, void *dev)
irq:要释放的中断。dev:如果中断设置为共享(IRQF_SHARED)的话,此参数用来区分具体的中断。
irqreturn_t (*irq_handler_t) (int, void *)
中断处理函数格式
10 enumirqreturn { 11 IRQ_NONE =(0<<0), 12 IRQ_HANDLED =(1<<0), 13 IRQ_WAKE_THREAD =(1<<1), 14 }; 15 16 typedef enum irqreturn irqreturn_t;
void enable_irq(unsigned int irq)
void disable_irq(unsigned int irq
中断使能, 禁止某一个中断, 等到当前正在执行的中断处理函数执行完才返回
void disable_irq_nosync(unsigned int irq)
不会等待当前中断处理程序执行完毕。
local_irq_enable()
local_irq_disable()
local_irq_enable用于使能当前处理器中断系统,local_irq_disable用于禁止当前处理器中断系统, 恢复的时候可能会导致不可预知错误
local_irq_save(flags)
local_irq_restore(flags)
这两个函数是一对,local_irq_save函数用于禁止中断,并且将中断状态保存在flags中。local_irq_restore用于恢复中断,将中断到flags状态.
上半部下半部
我们在使用request_irq申请中断的时候注册的中断服务函数属于中断处理的上半部,只要中断触发,那么中断处理函数就会执行
在实际处理的时候, 有的中断处理函数会占用大量的时间, 不符合中断的规则
中断处理函数仅仅响应中断,然后清除中断标志位即可。这个时候中断处理过程就分为了两部分:
上半部:上半部就是中断处理函数,那些处理过程比较快,不会占用很长时间的处理就可以放在上半部完成。
下半部:如果中断处理过程比较耗时,那么就将这些比较耗时的代码提出来,交给下半部去执行,这样中断处理函数就会快进快出。
- 如果要处理的内容不希望被其他中断打断,那么可以放到上半部。
- 如果要处理的任务对时间敏感,可以放到上半部
- 如果要处理的任务与硬件有关,可以放到上半部
- 除了上述三点以外的其他任务,优先考虑放到下半部。
软终端
使用结构体softirq_action表示软中断, include/linux/interrupt.h
433 struct softirq_action
434 {
435 void(*action)(structsoftirq_action *);
436 };
在kernel/softirq.c文件中一共定义了10个软中断, 被定义为一个枚举类型
要使用软中断,必须先使用open_softirq函数注册对应的软中断处理函数
void open_softirq(int nr, void (*action)(struct softirq_action *))
nr:要开启的软中断。action:软中断对应的处理函数。
**必须在编译的时候静态注册, **内核中默认会打开TASKLET_SOFTIRQ和HI_SOFTIRQ
void raise_softirq(unsigned int nr)
注册以后触发, nr:要触发的软中断
tasklet
tasklet是利用软中断来实现的另外一种下半部机制, 建议使用这一个
Linux内核使用tasklet_struct结构体来表示tasklet
484 struct tasklet_struct
485 {
486 structtasklet_struct *next; /* 下一个tasklet */
487 unsignedlongstate; /* tasklet状态*/
488 atomic_t count;/* 计数器,记录对tasklet的引用数*/
489 void(*func)(unsignedlong); /* tasklet执行的函数*/
490 unsignedlongdata; /* 函数func的参数*/
491 };
void tasklet_init(struct tasklet_struct *t,void (*func)(unsigned long), unsigned long data);
进行结构物初始化, t:要初始化的
taskletfunc:tasklet的处理函数。data:要传递给func函数的参数
也 可 以 使 用 宏DECLARE_TASKLET来 一 次 性 完 成tasklet的 定 义 和 初 始 化,
DECLARE_TASKLET(name, func, data)
name为要定义的
tasklet名字,这个名字就是一个tasklet_struct类型的时候变量,func就是tasklet的处理函数,data是传递给func函数的参数
- 在上半部,也就是中断处理函数中调用tasklet_schedule函数就能使tasklet在合适的时间运行,tasklet_schedule函数原型如下
void tasklet_schedule(struct tasklet_struct *t)
也要使用上半部, 但是主要的作用是调用下半部的处理函数
工作队列
工作队列在进程上下文执行,工作队列将要推后的工作交给一个内核线程去执行,因为工作队列工作在进程上下文,因此工作队列允许睡眠或重新调度。
使用work_struct结构体表示一个工作
struct work_struct {
atomic_long_t data;
structlist_head entry;
work_func_t func;/* 工作队列处理函数*/
};
直接定义一个work_struct结构体变量即可,然后使用INIT_WORK宏来初始化工作
#define INIT_WORK(_work, _func)
_work表示要初始化的工作,_func是工作对应的处理函数,
static void kaywork(struct work_struct *work)
也可以使用DECLARE_WORK宏一次性完成工作的创建和初始化
#define DECLARE_WORK(n, f)
n表示定义的工作(work_struct),f表示工作对应的处理函数
和tasklet一样,工作也是需要调度才能运行的,工作的调度函数为schedule_work
bool schedule_work(struct work_struct *work)
由于最后调用的函数参数是work_struct结构体, 所以可以使用函数container_of获取结构体所在的结构体的首地址, 第一个参数, 传入的work结构体, 第二个参数所在的结构体, 第三个参数自己的名字
在设备树中描述
Linux内核通过读取设备树中的中断属性信息来配置中断
打开imx6ull.dtsi文件,其中的intc节点就是I.MX6ULL的中断控制器节点
intc: interrupt-controller@00a01000 {
compatible = "arm,cortex-a7-gic";
#interrupt-cells = <3>;
interrupt-controller;
reg = <0x00a01000 0x1000>,
<0x00a02000 0x100>;
};
- compatible = “arm,cortex-a7-gic”;描述使用的驱动文件
- #interrupt-cells = <3>; 表示此中断控制器下设备的cells大小
第一个cells:中断类型,0表示SPI中断,1表示PPI中断。第二个cells:中断号,对于SPI中断来说中断号的范围为0~987,对于PPI中断来说中断号的范围为0~15。第三个cells:标志,bit[3:0]表示中断触发类型,为1的时候表示上升沿触发,为2的时候表示下降沿触发,为4的时候表示高电平触发,为8的时候表示低电平触发。bit[15:8]为PPI中断的CPU掩码
gpio1: gpio@0209c000 {
compatible = "fsl,imx6ul-gpio", "fsl,imx35-gpio";
reg = <0x0209c000 0x4000>;
interrupts = <GIC_SPI 66 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 67 IRQ_TYPE_LEVEL_HIGH>;
gpio-controller;
#gpio-cells = <2>;
interrupt-controller;
#interrupt-cells = <2>;
};
在单独的gpio中把cell改为2,
fxls8471@1e {
compatible = "fsl,fxls8471";
reg = <0x1e>;
position = <0>;
interrupt-parent = <&gpio5>; //父中断
interrupts = <0 8>; //指定对应的引脚以及触发电平
};
0表示GPIO5_IO00,8表示低电平触发, 1是上升沿, 2是下降沿, 4高电平触发
①、#interrupt-cells,指定中断源的信息cells个数。②、interrupt-controller,表示当前节点为中断控制器。③、interrupts,指定中断号,触发方式等。④、interrupt-parent,指定父中断,也就是中断控制器
- interrupt-controller; 这是一个中断控制器
对应的函数
unsigned int irq_of_parse_and_map(struct device_node *dev,int index)
dev:设备节点。index:索引号,interrupts属性可能包含多条中断信息,通过index指定要获取的信息
int gpio_to_irq(unsigned int gpio)
gpio:要获取的GPIO编号